Влияние диссипативного момента на движение твердого тела в гравитационном поле.
Опубликовано Ingus в вс, 05/02/2017 - 03:10
Мысли о влиянии приливного трения на наклон земной оси привели меня к задаче о движении симметричного тяжелого волчка при наличии возмущающих моментов. Уравнения движения волчка в случае Лагранжа решаются достаточно просто аналитически, а движения волчка хорошо известны – это прецессия и нутация оси вращения. Диссипативный момент, такой как трение, лишает нас возможности воспользоваться интегралами движения, поэтому уравнения движения волчка при наличии трения придется решать численно.
Здесь я приведу необычный способ записи уравнений движения волчка, отличный от всем известных динамических уравнений Эйлера вкупе с кинематическими, его же имени. Для начала стоит сказать несколько слов о системе координат, благодаря которой вместо шести дифференциальных уравнений первого порядка мы имеем три уравнения второго порядка [1]. Это вращающаяся система координат ($Oxyz$), угловая скорость которой $ \mathbf{\Omega}$ отличается от угловой скорости волчка $ \mathbf{\omega}$, т.е. базис этой системы подвижен как в инерциальном пространстве ($OXYZ$) так и относительно тела (Рис. 1). Выбор такой системы возможен для осесимметричного тела ("экваториальные" осевые моменты инерции равны, $A=B$).
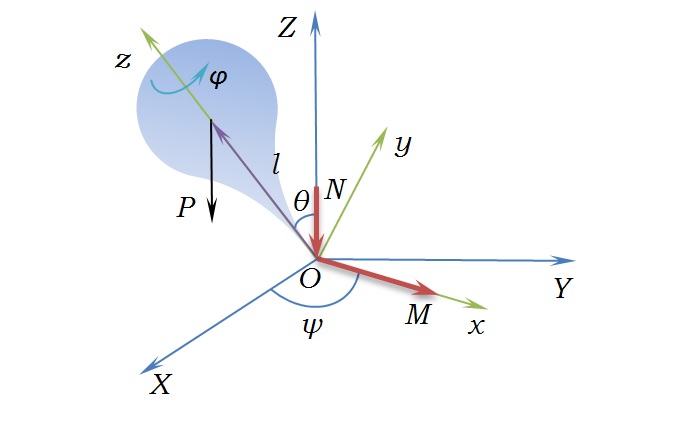 Рис.1.
Рис.1.
Производная от вектора кинетического момента равна сумме моментов внешних сил, действующих на тело. Поскольку не только компоненты вектора кинетического момента, но и ориентация осей подвижной системы координат изменяются со временем, в записи производной появляется слагаемое, зависящее от угловой скорости вращения подвижной системы координат:
$\frac{\partial \mathbf{L}}{\partial t}+\mathbf{\Omega}\times\mathbf{L}=\mathbf{M}+\mathbf{N}$ (1),
где $\mathbf{L}$ - вектор кинетического момента, $\mathbf{N}$ - момент силы трения, $\mathbf{M}$ - момент силы тяжести.
Проекции этого векторного равенства на оси подвижной системы координат образуют систему трех скалярных дифференциальных уравнений движения:
$\begin{align*}\\A\ddot\theta+\dot\psi\sin\theta[C(\dot\varphi+\dot\psi\cos\theta)-A\dot\psi\cos\theta]&=Pl\sin\theta+N_x\\A\ddot\psi\sin\theta+2A\dot\psi\dot\theta\cos\theta-C\dot\theta(\dot\varphi+\dot\psi\cos\theta)&=N_y\\C(\ddot\varphi+\ddot\psi\cos\theta-\dot\psi\dot\theta\sin\theta)&=N_z\\\end{align*}$ (2)
Рассмотрим конкретный волчок:
$A=B=0.004$, $C=1.1A$, $\dot\varphi(0)=20\pi$, $Pl=0.1$, $M_x=Pl\sin\theta$, $M_y=M_z=0$, $ N_x=0$, $ N_y=-N\sin\theta $, $ N_z=-N\cos\theta $, $N=0.001$, $\theta(0)=0.4$, прочие начальные условия равны нулю.
Результаты расчета первых 100 секунд таковы: волчок прецессирует вначале с периодом около 17 секунд (Рис. 2). Постепенно скорость его вращения падает (Рис. 3). Угол наклона к вертикали увеличивается (Рис. 4).
.jpg) Рис. 2.
Рис. 2.
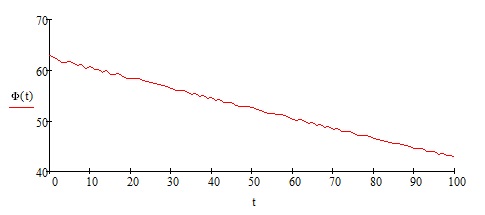 Рис. 3.
Рис. 3.
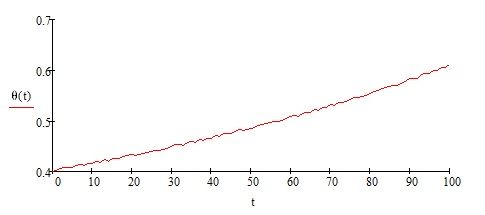 Рис. 4.
Рис. 4.
Теперь изменим знак момента силы тяжести на обратный. Волчок прецессирует в обратную сторону (Рис. 5). Его собственное вращение замедляется (Рис. 6). Угол наклона к вертикали вопреки ожиданиям увеличивается (Рис. 7.)
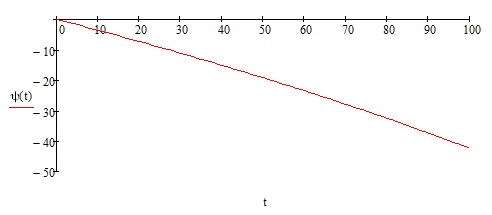 Рис. 5.
Рис. 5.
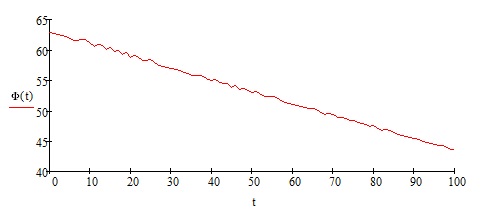 Рис. 6.
Рис. 6.
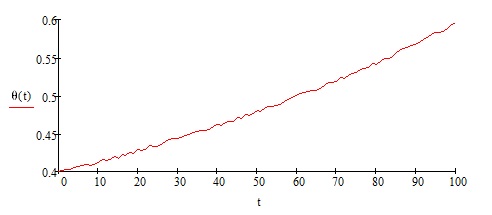 Рис. 7.
Рис. 7.
Систему уравнений (2) можно существенно упростить, если пренебречь двумя компонентами кинетического момента: $L_x=0$, $L_y=0$, $L_z=C\omega$, где $\omega$ - угловая скорость собственного вращения волчка, достаточно большая, чтобы пренебречь двумя прочими компонентами кинетического момента [2].
Выпишем компоненты угловой скорости $\Omega$ подвижного триэдра:
$\Omega_x=\dot\theta$, $\Omega_y=\dot\psi\sin\theta$, $\Omega_z=\dot\psi\sin\theta$,
Подставляя эти значения в уравнение моментов (1):
$\\\dot{L}_x+\Omega_yL_z-\Omega_zL_y=M_x+N_x\\\dot{L}_y+\Omega_zL_x-\Omega_xL_z=M_y+N_y\\\dot{L}_z+\Omega_xL_y-\Omega_yL_x=M_z+N_z\\$ (3)
получим:
$\begin{align*}\\C\omega\dot\psi\sin\theta&=Pl\sin\theta\\-C\omega\dot\theta&=-N\sin\theta\\C\dot\omega&=-N\cos\theta\\\end{align*}$ (4)
Даже не решая эту систему уравнений, можно сделать вывод, что угловая скорость собственного вращения падает ($\dot\omega<0$), а угол нутации растет ($\dot\theta>0$), в том числе при изменении знака опрокидывающего момента (при этом меняется только направление прецессии).
Если все эти рассуждения применить к системе Земля-Луна, то получится, что момент приливных сил, действующих на Землю со стороны Луны примерно в плоскости эклиптики, за достаточно большой период времени мог существенно увеличить наклон земной оси, не смотря на то, что гравитационный момент, действующий на экваториальные вздутия, стремился поставить земную ось перпендикулярно плоскости эклиптики, вызывая при этом ее, оси, прецессию.
________
Источники информации.
1. Виттенбург Й. Динамика систем твердых тел. М.: Мир, 1980.
http://eqworld.ipmnet.ru/ru/library/books/Vittenburg1980ru.djvu
2. Николаи Е.Л. Теория гироскопов. М.: Л.: ОГИЗ ГИТТЛ, 1948.
- Ingus's блог
- Войдите на сайт для отправки комментариев
- 4282 просмотра